Federico Camarda
Federico Camarda
Home
Courses
Projects
Talks
Publications
Contact
Light
Dark
Automatic
Projects
ADAS on the Alpine A390
Development of sensor fusion and scene understanding algorithms powering Adaptive Cruise Control (ACC), Autonomous Emergency Braking (AEB) and Local Hazards Detection (V2X) on the next-generation Alpine A390 and other vehicles on the same project.
ADAS on the Renault 5
Development of sensor fusion and scene understanding algorithms powering Adaptive Cruise Control (ACC) and Autonomous Emergency Braking (AEB) on the next-generation Renault 5 and other vehicles on the same project.
Scene Understanding for ADAS on the FlexEVan SDV
Development of scene-understanding, perception, and sensor-fusion algorithms powering ADAS functions (AEB, ACC, LCA, ELKA) on Ampere’s FlexEVan - one of the first Software-Defined Vehicles (SDV) from Renault Group and in Europe.
Fusion of evidential occupancy grids for cooperative perception
Published and oral presentation at SOSE18
PDF
Slides
Video
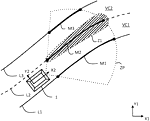
Method for detecting a boundary of a traffic lane
US Patented invention (US20240426624A1) for intelligent vehicle perception of lane boudaries
PDF
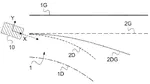
Method for detecting a centre line of a traffic lane and for controlling a motor vehicle
EU Patented invention (WO2024121172A1) for intelligent vehicle navigation on estimated lane center
PDF
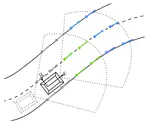
Multi-sensor data fusion for lane boundaries detection applied to autonomous vehicle
PhD thesis defended at Université de Technologie de Compiègne
PDF
Slides
Video
Multi-sensor Tracking of Lane Boundaries based on Smart Sensor Fusion
Published and oral presentation at IV2020
PDF
Video
Cite
×