Procédé de détection d'une limite d'une voie de circulation
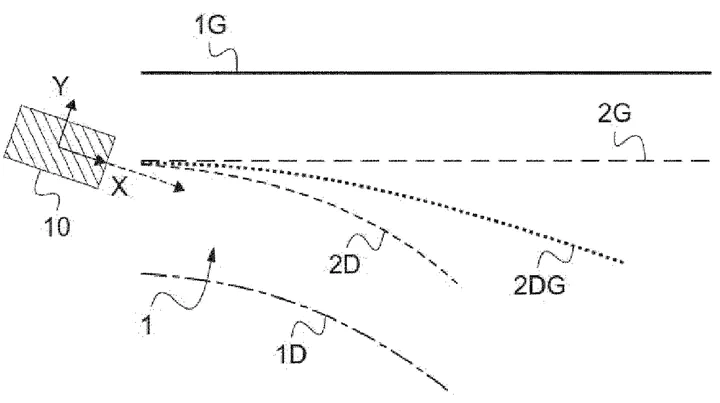 Figure 2 from the patent
Figure 2 from the patent
Abstract
The invention relates to a method (P1) for detecting a boundary (L1, L2, L3) of a traffic lane (VC1, VC2) for an automotive vehicle (1). The method comprises: (E1) detecting the lane boundary using an environmental sensing device (3), the boundary being defined by a function, in particular a polynomial function; (E4) determining a plurality of first vectors (MXi) characterizing the boundary based on map data and on the current position and orientation of the vehicle; (E6) determining a plurality of second vectors (Fj) characterizing the boundary, each second vector being obtained by an orthogonal projection of a first vector onto the boundary function; (E8) computing Mahalanobis distances between each first vector and each second vector. The invention aims to improve robustness in lane boundary detection by leveraging both sensed and map-based information.
Federico Camarda
AD/ADAS Sofware Engineer | PhD in Automation and Robotics
My work and research aim is to make vehicles smarter and safer.