Method for detecting a boundary of a traffic lane
Abstract
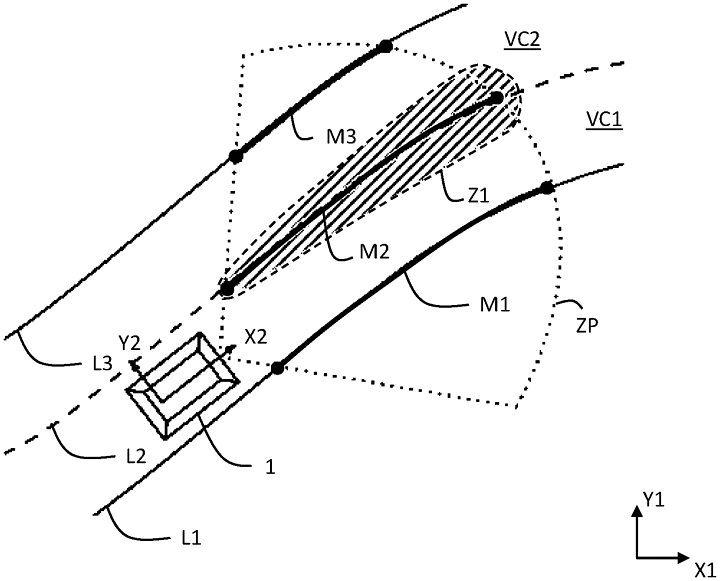
The method (P1) for detecting a boundary (L1, L2, L3) of a traffic lane (VC1, VC2) for a motor vehicle (1) involves detecting the boundary by a vehicle environment detection means, the boundary being defined by a function (typically polynomial), determining a plurality of first vectors characterizing the boundary based on map data and vehicle pose, determining a plurality of second vectors characterizing the boundary through orthogonal projection onto said function, and calculating Mahalanobis distances between each first and second vector.
Type
Publication
Patent US20240426624A1
Federico Camarda
AD/ADAS Sofware Engineer | PhD in Automation and Robotics
My work and research aim is to make vehicles smarter and safer.