Multi-sensor data fusion for lane boundaries detection applied to autonomous vehicle
Abstract
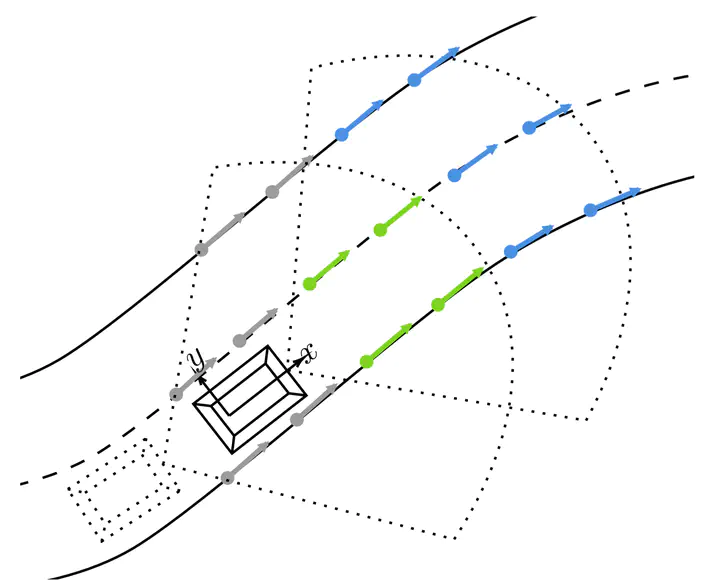
This doctoral thesis investigates multi-sensor data fusion strategies for the detection of lane boundaries in the context of autonomous driving. The work leverages heterogeneous sensor modalities, high-definition maps, and smart sensing techniques to improve the robustness and accuracy of lane boundary perception. The contributions focus on fusion architectures, map-based assistance, and real-time perception pipelines, demonstrating their relevance for modern autonomous vehicle systems.
Type
Publication
PhD Thesis Université de Technologie de Compiègne
Federico Camarda
AD/ADAS Sofware Engineer | PhD in Automation and Robotics
My work and research aim is to make vehicles smarter and safer.