Abstract
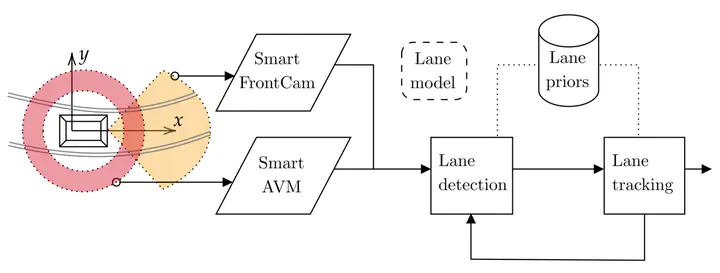
Lane detection plays a crucial role in autonomous driving systems. While commercial vehicles provide lane keep assist and lane departure warning via integrated smart cameras, these sensors alone do not ensure sufficient performance for higher levels of autonomy. This paper proposes a multi-sensor tracking approach for generic lane boundaries based on smart sensor fusion. The method uses established filtering techniques and a flexible clothoid spline representation, supported by fine-tuned measurement models leveraging data from both off-the-shelf and prototype smart sensors. Designed with real-time constraints and limited ADAS ECU resources in mind, the approach is validated against lane-level ground truth and experimental acquisitions.
Federico Camarda
AD/ADAS Sofware Engineer | PhD in Automation and Robotics
My work and research aim is to make vehicles smarter and safer.