Federico Camarda
Federico Camarda
Home
Courses
Projects
Talks
Publications
Contact
Light
Dark
Automatic
Autonomous Driving
Promoted to Senior Software Tech Lead, AD/ADAS Scene Understanding
Promoted to Senior Software Tech Lead for AD/ADAS Scene Understanding at Ampère (Renault Group).
May 1, 2026 —
Federico Camarda
Talk at AutoSens Europe 2026: Multimodal Sensor Fusion and Operational Uncertainty
Heading to Barcelona for AutoSens Europe 2026 to present on multimodal sensor fusion and quantifying operational uncertainty for AD/ADAS.
Apr 15, 2026 —
Barcelona, Spain
Federico Camarda
Preliminary agenda
Teaching: Sensor Fusion and Scene Understanding for AD/ADAS at Centrale Nantes
Lectio magistralis delivered for the ECN Datasim course, introducing key concepts in sensor fusion and scene understanding for autonomous driving and ADAS.
Mar 2, 2026 9:00 AM — 5:00 PM
Centrale Nantes
Teaching: Sensor Fusion and Scene Understanding for AD/ADAS at ESIEE Paris
Lectio magistralis delivered for the ESIEE, introducing key concepts in sensor fusion and scene understanding for autonomous driving and ADAS.
Oct 2, 2025 9:00 AM — 5:00 PM
ESIEE Paris
Paper Acceptance: Perception Metrics for Intelligent Vehicles at IEEE ITSC 2025
Accepted paper at IEEE ITSC 2025 benchmarking uncertainty estimation methods and safety-centric metrics for AEB applications.
Jul 1, 2025 —
Galia Fabiola Cornejo Urquieta
,
Javier Ibanez-Guzman
,
Federico Camarda
,
Julien Moreau
,
Yves Grandvalet
Teaching: Sensor Fusion and Scene Understanding for AD/ADAS at ECN Nantes
Lectio magistralis delivered for the ECN Datasim, introducing key concepts in sensor fusion and scene understanding for autonomous driving and ADAS.
Mar 3, 2025 9:00 AM — 5:00 PM
ECN
Teaching: Sensor Fusion and Scene Understanding for AD/ADAS at ENSTA Paris
Lectio magistralis delivered for the ENSTA Mastère Spécialisé, introducing key concepts in sensor fusion and scene understanding for autonomous driving and ADAS.
Feb 5, 2025 9:00 AM — 5:00 PM
ENSTA Paris
Introduction to Sensor Fusion and Scene Understanding in AD/ADAS
A graduate-level course covering multi-sensor perception, probabilistic fusion, object tracking, and scene understanding for autonomous driving and ADAS — with hands-on Python lab exercises.
Last updated on Mar 28, 2026
Code
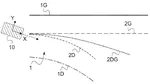
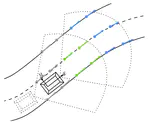
Procédé de détection d'une limite d'une voie de circulation
A patent describing a method for robust lane boundary detection using map data, polynomial boundary representation, and Mahalanobis distance computations.
Federico Camarda
,
Véronique Cherfaoui
,
Franck Davoine
,
Bruno Durand
Cite
Source Document
Multi-sensor data fusion for lane boundaries detection applied to autonomous vehicle
A PhD thesis presenting data fusion methods combining sensors and HD maps to enhance lane boundary detection for autonomous vehicles.
Federico Camarda
PDF
Cite
Source Document
»
Cite
×